Nay nhóm MBA đăng phần thứ 3 loạt bài về mô hình SEM của tác giả Phạm Đức Kỳ – (Nguồn: mba-15.com) để cung cấp thêm kiến thức cho các bạn học viên quan tâm. Loạt bài này gồm 5 phần.
Phần thứ 3: Giới thiệu về các dạng mô hình chủ yếu khi phân tích SEM:mô hình đo lường, mô hình cấu trúc, mô hình xác lập, mô hình không xác lập, mô hình bão hòa, mô hình độc lập...
5. CÁC DẠNG
MÔ HÌNH
Theo Vinod
Kumar, Deregouska,2003 thì mô hình SEM gồm hai mô hình có liên quan với nhau là
mô hình đo lường và mô hình cấu trúc. Cả hai mô hình đều được xác định cụ thể bởi
nhà nghiên cứu:
5.1 Mô
hình đo lường: (còn
gọi là mô hình nhân tố, mô hình ngoài) diễn tả cách các biến quan sát thể hiện
và giải thích các biến tiềm ẩn thế nào: tức là diễn tả cấu trúc nhân tố (biến
tiềm ẩn), đồng thời diễn tả các đặc tính đo lường ( độ tin cậy, độ giá trị) của
các biến quan sát. Các mô hình đo lường cho các biến độc lập có thể đơn hướng,
có thể tương quan hay có thể xác định các biến tiềm ẩn bậc cao hơn. Mô hình đo
lường ( hình 7) cho thấy các liên hệ thống kê giữa các biến quan sát, ta có thể
dùng để chuẩn hoá mô hình cấu trúc cơ bản. Các biến tiềm ẩn được nối kết bằng
các quan hệ dạng hồi quy chuẩn hoá, tức là ước lượng các giá trị cho các hệ số
hồi quy.
Hình 7 : Mô
hình đo lường

Mô hình đo
lường dùng phân tích nhân tố để đánh giá mức độ mà biến quan sát tải lên các
khái niệm tiềm ẩn của chúng. Để đánh giá độ giá trị (hội tụ và phân biệt) của
các biến quan sát sử dụng kỹ thuật phân tích nhân tố khẳng định(CFA) và ma trận
Covariance dựa trên mô hình SEM,.
5.2 Mô
hình cấu trúc: Xác
định các liên kết (quan hệ nhân quả) giữa các biến tiềm ẩn bằng mũi tên nối kết,
và gán cho chúng các phương sai giải thích và chưa giải thích, tạo thành cấu
trúc nhân quả cơ bản. Biến tiềm ẩn được ước lượng bằng hồi quy bội của các biến
quan sát. Mô hình SEM không cho phép sử dụng khái niệm biểu thị bởi biến quan
sát đơn.Thông thường biến tiềm ẩn đo lường bởi ít nhất là trên một biến, hay từ
3 đến tối đa là 7 biến quan sát.[Hair et al, Chap 11, 2000]
Mô hình SEM
có thể có nhiều dạng khác nhau:
Hình 8: Mô
hình SEM và các phần tử cơ bản của nó

a) Một biến
tiềm ẩn độc lập đơn có thể dự báo một biến tiềm ẩn phụ thuộc đơn.
b) Vài biến
tiềm ẩn có thể tương quan trong dự báo một biến phụ thuộc nào đó.
c) Một biến
tiềm ẩn độc lập có thể dự báo một biến tiềm ẩn khác, rồi biến này lại dự báo một
biến thứ ba,
5.3 Mô
hình xác lập (recursive)
Mô hình có
02 đặc điểm cơ bản :
- Các số hạng
sai số của nó không có tương quan với nhau
- Mọi tác động
nhân quả đều đơn hướng.
Mô hình
Recursive được sử dụng phổ biến trong các mô hình nghiên cứu nhờ ưu điểm là dễ
mô hình hoá, có tính ổn định hơn nhiều so với mô hình Non-Recursive, và luôn được
xác định (được trình bày cụ thể trong phần 2.3.3 Tính xác định của mô hình)
Hình 9: Mô
hình SEM với trạng thái xác lập (ổn định) của nó

X, Y : Biến
ngoại sinh E: Số hạng sai số
W, Z: Biến nội
sinh <---> Covariance (Tương quan )
5.4 Mô
hình không xác lập (Non-Recursive)
Hình 10: Mô
hình SEM với trạng thái chưa xác lập (không ổn định)
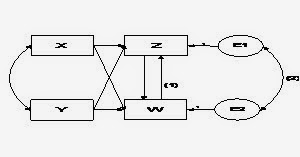
Mô hình
Non-Recursive có vòng lặp phản hồi giữa các biến nội sinh, hoặc:
- Khi hai biến nội sinh ảnh hưởng
lẫn nhau, tức là có vòng lặp phản hồi (1) , hoặc:
- Có vòng lặp giữa hai biến nội
sinh và các số hạng sai số của hai biến nội sinh (2)
Mô hình
Non-recursive chỉ có tính tạm thời, không ổn định so với mô hình Recursive, ngoài ra, mô hình recursive dễ sử dụng nên thông thường nếu có thể các nhà
nghiên cứu thường quy đổi mô hình Non-Recursive về mô hình Recursive.
5.5 Mô
hình bão hoà (Saturated Model): Mô hình bão hoà (hình 11) chứa rất nhiều các thông số cần ước
lượng bằng với số đầu vào(input) trong phân tích.Vì vậy mô hình này không có bậc
tư do(df=0). Đây là mô hình ít hạn chế(ràng buộc) nhất mà nó có thể phù hợp với
bộ dữ liệu.

5.6 Mô
hình độc lập (Independence Model)
Mô hình độc
lập (Hình 12) là mô hình có nhiều ràng buộc nhất mà nó có thể phù hợp với bộ dữ
liệu, có tối đa số bậc tự do. Nó chỉ chứa các ước lượng phương sai của các biến
quan sát, tức là giả định các quan hệ giữa các biến quan sát không có.
Hình 12: Mô
hình độc lập của SEM

5.7 Mô
hình SEM tổng quát :
cho phép mô hình gồm nhiều khái niệm tiềm ẩn được chỉ báo bởi các biến quan sát
( độc lập và phụ thuộc) và cho cả các quan hệ ổn định (Recursive) và
không ổn định (non-recursive) giữa các biến khái niệm. Tóm lại mô
hình SEM là sự kết hợp giữa mô hình đo lường và mô hình cấu trúc.
Khi làm bài luận thạc sĩ thực tế, mô hình sẽ có dạng tương tự như sau:

Không có nhận xét nào:
Đăng nhận xét